Gesture Commands for Robot InTeraction
(2013 - 2016)
Gestures constitute a crucial element in human communication, as well as in human-robot interaction, thus, gesture recognition has been a field of particular interest in computer science. More specifically, dynamic gesture recognition is a challenging task, since it requires the accurate detection of the body parts involved in the gesture, their tracking and the interpretation of their sequential movement.
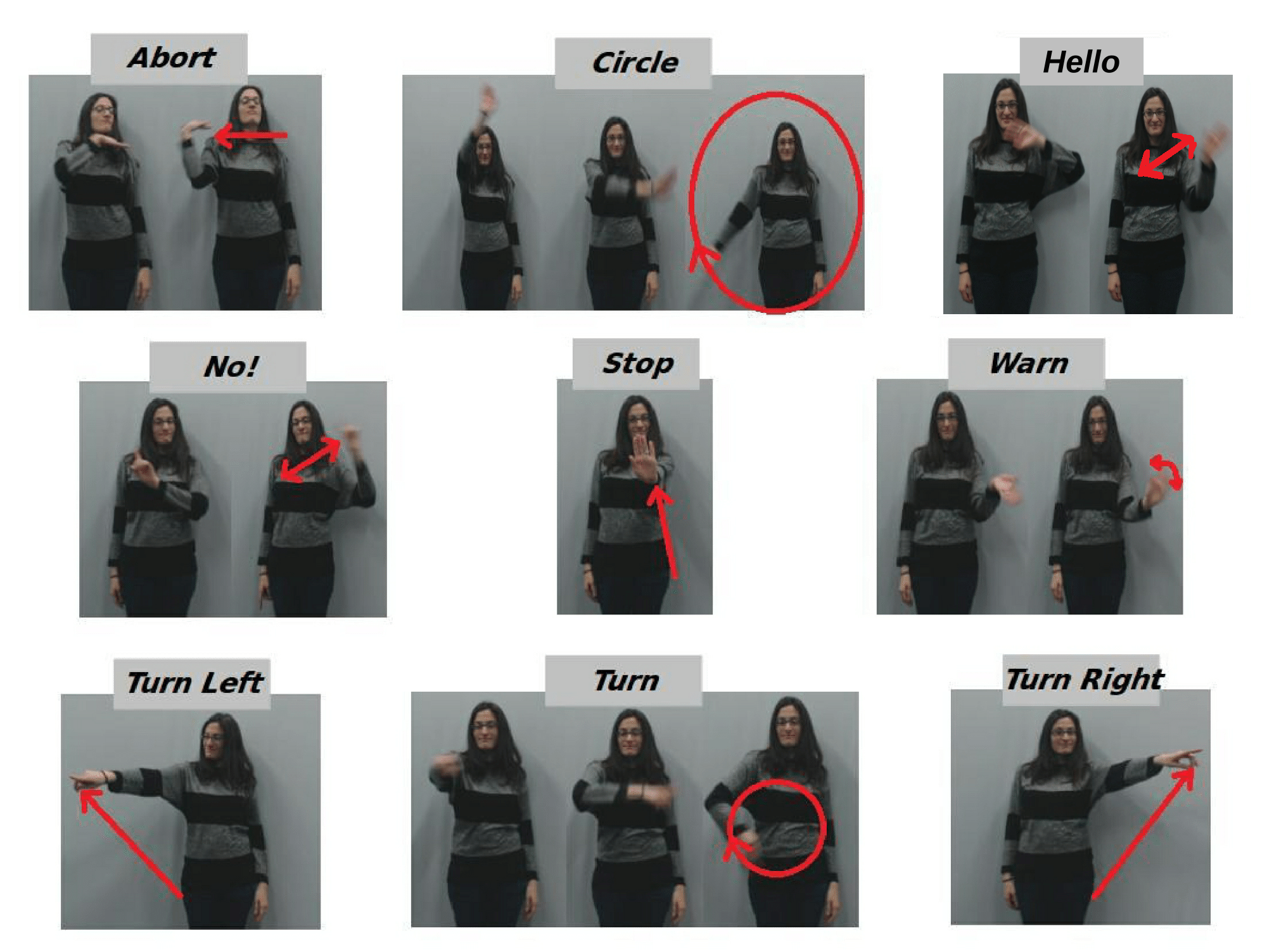
To evaluate our systems on a dynamic command gesture recognition task, we designed, recorded and organized the TsironiGR corpus. This corpus contains nine command gestures for Human-Robot Interaction (HRI): Abort, Circle, Hello, No, Stop, Turn Right, Turn Left, and Warn. Six different subjects were recorded, each one performing at least ten times the same gesture. We recorded a total of 543 sequences. Each of the gesture sequences is segmented and labeled with one of the nine classes. The gestures were captured by an RGB camera with a resolution of 640x480, recorded with a frame rate of 30 FPS.
For more information, please refer to: